
Agent Products
| Type | Horizontal articulated type | |||
| Degree of freedom (axes) | 4 axes each arm | |||
| Max. payload(kg) | 2 kg each arm (4 kg total) | |||
| Positional repeatability (mm) | +/-0.05 | |||
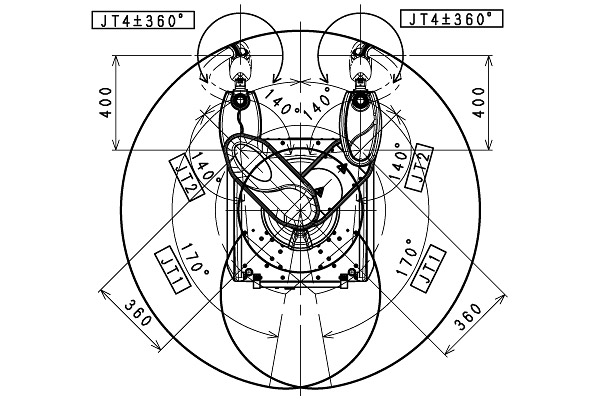
| Motion range (°) | Lower arm | Upper arm | ||
| Arm rotation (°) | -170 to +170 (JT1) | -140 to +500 (JT1) | ||
| Arm rotation (°) | -140 to +140 (JT2) |
-140 to +140 (JT2) |
||
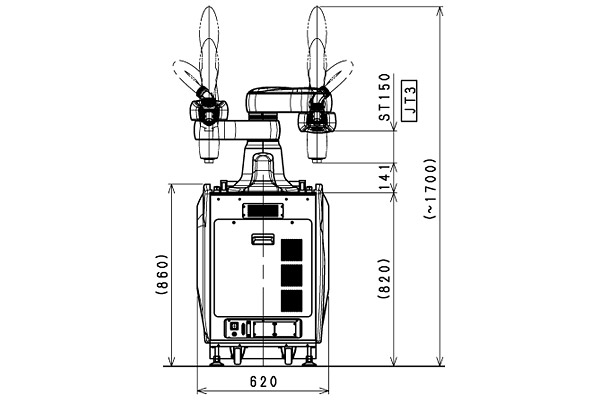
| Arm up-down (mm) | 0 to +150 (JT3)*1 | 0 to +150 (JT3)*1 | ||
| Wrist swivel (°) | -360 to 360 (JT4)*1 | -360 to +360 (JT4)*1 | ||
| Controller (D61) | Number of controlled axes | Max. 12 | ||
| Drive system | Full digital servo system | |||
| Coordinate systems | Joint, Base, Tool | |||
| Types of motion control | Joint/Linear/Circular Interpolated motion | |||
| Programming | Programming, Direct teach | |||
| Memory capacity (MB) | 4 | |||
| General purpose signals | Input (Channels) | NPN model:12 (Max 24) / PNP model:6 (Max 16) / Cubic-S model:6 (Max 16)*2 | ||
| Output (Channels) | NPN model:4 (Max 12) / PNP model:10 (Max 24) / Cubic-S model:0 (Max 14)*2 | |||
| Power requirements | AC200-240V, 50/60Hz±2%, 1Φ, Max. 2.0kVA | |||
| Class-D earth connection (Earth connection dedicated to robots), leakage current: Maximum 10mA | ||||
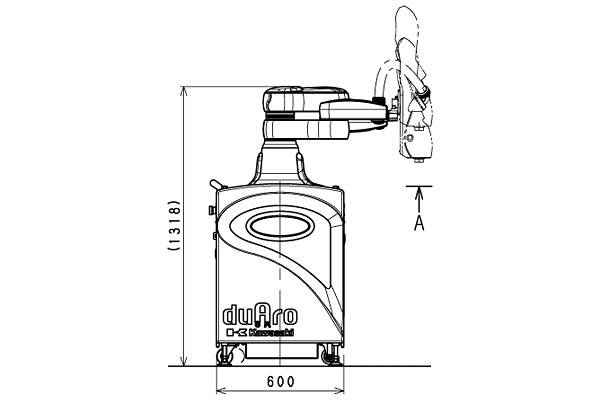
| Mass (kg) | About 200 | |||
| Installation | Floor | |||
| Environmental condition | Temperature (°C) | 5 - 40 | ||
| Humidity (%) | 35 - 85(No condensation) | |||