KAWASAKI Dual Arm Scara Robot
Time:2017-12-29
frequency:
DuAro Robot
COLLABORATIVE ROBOT
The "duAro" Dual-arm SCARA Robot by Kawasaki Robotics:
A Brand-new Offering that Realizes the Concept of an innovative Dual-arm SCARA Robot
INNOVATIVE DESIGN
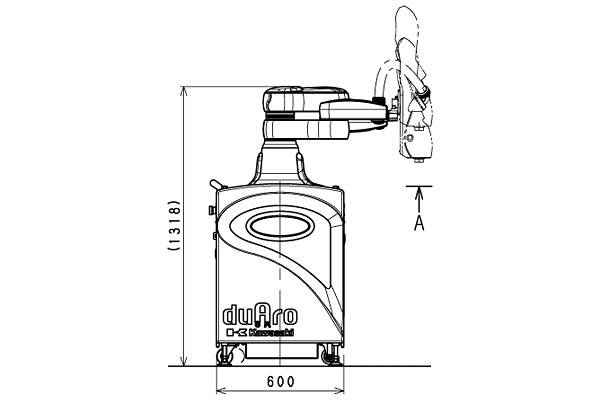
The duAro robot, with its two coaxial arms operated by one controller, can fit into a one-person space. In addition to providing independent arm operation, the single axis configuration enables the robot to easily pertorm coordinated arm movements, much like a human.
EASY & FLEXIBLE DEPLOYMENT
The base on which the arms are placed is on wheels and accommodates the controller. This enables the user to move the robot together with its base to any location desired.
COLLABORATIVE OPERATIONS
Low-power motors, a soft body, speed, force and work zone monitoring, and a deceleration function ebable the duAro to safely collaborate with humans in work operations. In the unlikely event of a collision, the collision detection function instantaneously stops the robot's movement.
EASY TEACHING
The lead-through teach function allows the user to easily teach the robot tasks by hand guiding its arms. Teaching operations can also be conveyed via a tablet which can be connected to multiple robots.
OPTIONS
Several vision systems and standard gripper options are available. Multiple I/O and fieldbus options are also offered. |
 |
 |
 |
 |
Main Parameter
|
Type |
Horizontal articulated type |
|
Degree of freedom (axes) |
4 axes each arm |
|
Max. payload(kg) |
2 kg each arm (4 kg total) |
|
Positional repeatability (mm) |
+/-0.05 |
|
Motion range (°) |
|
Lower arm |
Upper arm |
|
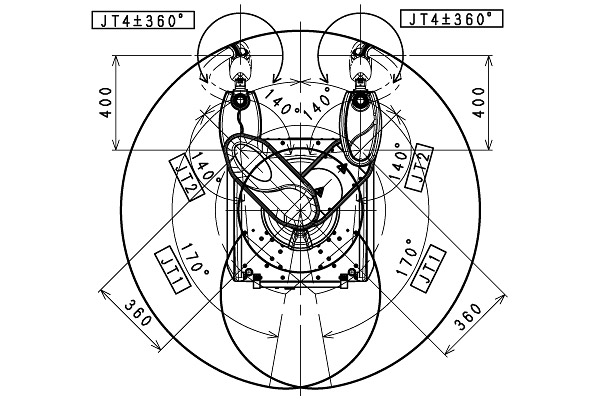
Arm rotation (°) |
-170 to +170 (JT1) |
-140 to +500 (JT1) |
|
Arm rotation (°) |
-140 to +140 (JT2) |
-140 to +140 (JT2)
|
|
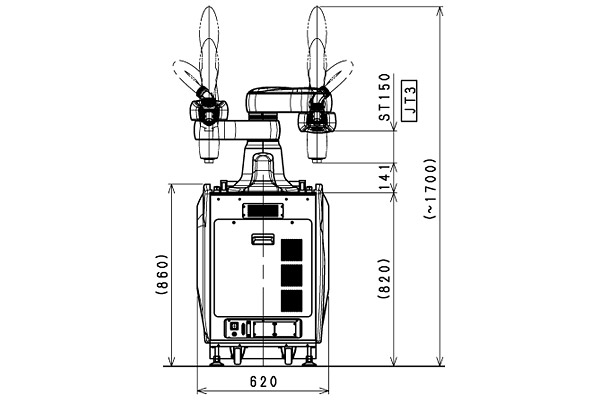
Arm up-down (mm) |
0 to +150 (JT3)*1 |
0 to +150 (JT3)*1 |
|
Wrist swivel (°) |
-360 to 360 (JT4)*1 |
-360 to +360 (JT4)*1 |
|
Controller (D61) |
Number of controlled axes |
Max. 12 |
|
Drive system |
Full digital servo system |
|
Coordinate systems |
Joint, Base, Tool |
|
Types of motion control |
Joint/Linear/Circular Interpolated motion |
|
Programming |
Programming, Direct teach |
|
Memory capacity (MB) |
4 |
|
General purpose signals |
Input (Channels) |
NPN model:12 (Max 24) / PNP model:6 (Max 16) / Cubic-S model:6 (Max 16)*2 |
|
|
Output (Channels) |
NPN model:4 (Max 12) / PNP model:10 (Max 24) / Cubic-S model:0 (Max 14)*2 |
|
Power requirements |
AC200-240V, 50/60Hz±2%, 1Φ, Max. 2.0kVA |
|
Class-D earth connection (Earth connection dedicated to robots), leakage current: Maximum 10mA |
|
Mass (kg) |
About 200 |
|
Installation |
Floor |
|
Environmental condition |
Temperature (°C) |
5 - 40 |
|
Humidity (%) |
35 - 85(No condensation) |
