武汉博奥思精密自动化有限公司
公司地址:武汉市蔡甸区大集街星光大道79号联东U谷创新企业港1栋1单元
市 场 部:汪经理 13886171713
人 事 部:027-69573069
传 真:N/A
邮 箱:sales@boaosi.com.cn
|
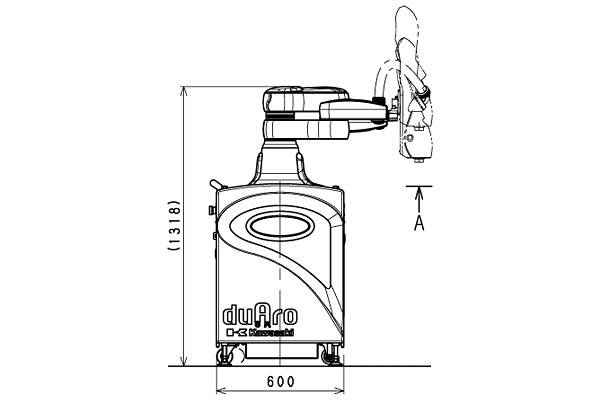
川崎机器人革新突破——双腕duAro 实现了真正的人机协作。 节省空间 设置在同一轴上的2个手臂可由1台控制柜控制,且其安装空间仅为1个人所需空间。同轴双手臂的构造不仅实现了双手臂作业,也实现了2台定位机器人无法做到的2个手臂相互协调、共同完成作业的可能。 设置简便 控制柜放置于设置手臂的台车内,通过移动台车即可简单的完成机器人的设置工作。 与人员的协同作业 选用低输出马达、并且通过区域监视实现的减速机能等,使得其与人员间的协同作业得以实现。除此之外,一旦机器人与作业人员发生碰撞可能,也会通过其配置的冲突检测功能瞬间停止机器人运行。 * 请实施风险评估、在充分降低风险的基础上进行使用。 简易示教 可通过操作人员手持机械手臂进行直接动作示教实现简易示教作业机能。 选件丰富 T/P示教器即触摸操作面板可与多台机器人进行连接。另外,还有视觉系统及抓手选件可供选择。 |
|||
 |
 |
 |
 |
| 手臂形式 | 水平多关节 | |||
| 动作自由度(轴) | 4*2手臂 | |||
| 最大可搬重量(kg) | 2(1手臂) | |||
| 重复定位精度(mm) | +/-0.05 | |||
| 最大行程 | 下手臂 | 上手臂 | ||
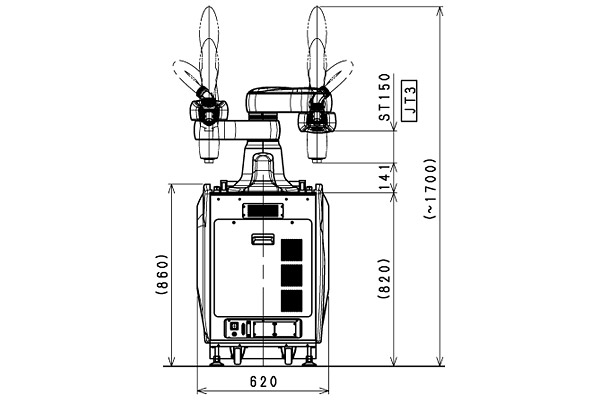
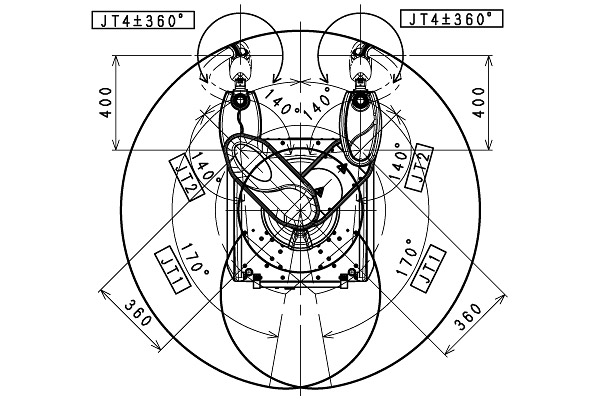
| 腕旋转(°) | -170至+170(JT1) | -510至+150(JT5) | ||
| 腕旋转(°) | -140至+140(JT2) | -140至+140(JT6) | ||
| 腕上下(mm) | 0至+150(JT3)*1 | 0至+150(JT7)*1 | ||
| 手腕回转(°) | -360至+360(JT4)*1 | -360至+360(JT8)*1 | ||
| 控制柜部分(D61) | 控制轴数(轴) | 最大12 | ||
| 驱动方式 | 全数字伺服系统 | |||
| 动作方式 | 示教模式 | 各轴独立、基础坐标系、工具坐标系 | ||
| 再现模式 | 各轴插补、直线插补 | |||
| 示教方式 | AS语言方式、直接示教 | |||
| 存储容量(MB) | 4 | |||
| I/O信号 | 通用输入(点) | NPN规格:12(最大28)/NPN规格:6(最大16)/Cubis-S规格:6(最大16)*2 | ||
| 通用输出(点) | NPN规格:4(最大12)/NPN规格:10(最大24)/Cubis-S规格:0(最大14)*2 | |||
| 电源规格 | AC200-240V、50/60HZ+/-2%、单相、最大2.0kVA | |||
| D种接地线(机器人专用接地)、最大漏电电流10mA以下 | ||||
| 本体重量(kg) | 约200 | |||
| 安装方式 | 地面式 | |||
| 安装环境 | 环境温度(℃) | 5-40 | ||
| 相对湿度(%) | 35-85(无结露) | |||
Copyright 2013-2017 武汉博奥思精密自动化有限公司 鄂ICP备18011408号-1 鄂公安网备 42011402000660号
